

Note: This chassis has been discontinued. As an alternative, please consider the Dagu Rover 5 tracked chassis or our Zumo tracked chassis.
Overview
 |
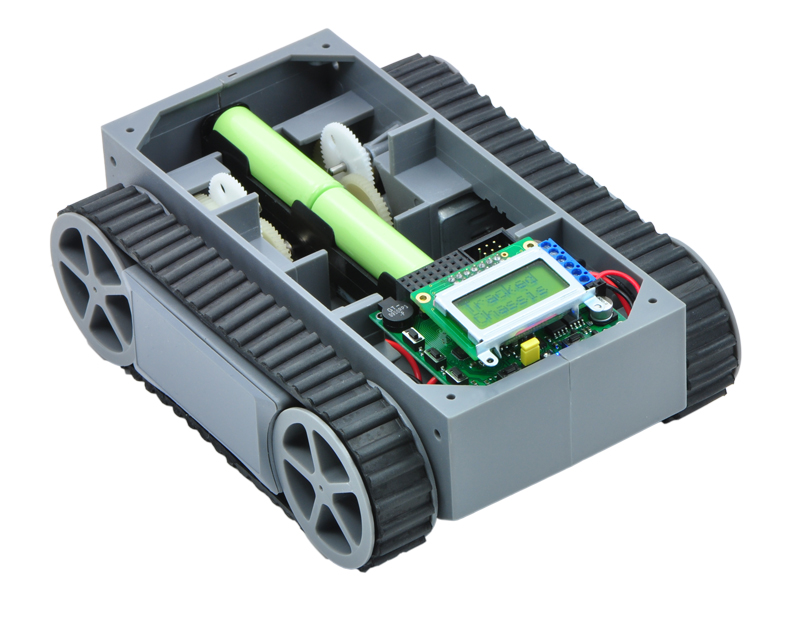
The RP5 tracked chassis is a mobile robot platform that uses caterpillar treads to drive over a variety of surfaces, turn in place, and smoothly handle small bumps and obstacles. Simply connect a robot controller or motor controller to the included 6-AA battery holder (AA batteries sold separately) and two DC motors to get the platform moving.
The chassis features a durable gray or yellow plastic body with room to house the included battery holder and some additional electronics, rubber treads for tackling uneven surfaces, and powerful motors that are strong enough to lift its own weight and let it achieve speeds as high as 6 in/s (15 cm/s). The outer dimensions of the chassis are approximately 7" long, 5.5" wide and 2.5" tall. One of the gears in each drive train has a hole that can be used for tracking motor rotation with a resolution of 4 counts per output shaft revolution, which corresponds to linear distance of about 1.5 inches.
 |
Feature summary
- durable plastic body
- 6-AA battery holder included
- two brushed DC motors with 210 mA free run and 2.4 A stall current at 7.2 V
- maximum speed of 6 in/s (15 cm/s) at 7.2 V
- ability to scale inclines limited only by friction
- dimensions: 7" x 5.5" x 2.5" (18 x 14 x 6 cm)
- weight: 15 oz (425 g)
 |
Two RP5/Rover 5 expansion plates with an Orangutan SV-328 and an Arduino Duemilanove. |
|---|
Expanding the chassis
You can customize your RP5 tracked chassis with our 1/8" acrylic expansion plates, which are available in narrow and wide versions. The plates feature flexible mounting hole patterns and include four tapping screws to mount the plate to the chassis. The plates come in 8 colors:
Using the Chassis
With only four motor leads and two battery leads, it is easy to interface the chassis with most dual motor controllers and robot controllers. Simply connect the battery holder leads to the controller’s power source and the motor leads to the controller’s motor driver outputs. The Orangutan SV-328 or Baby Orangutan robot controllers work well with this chassis and make it easy to get an autonomous robot up and running (note: the stall current exceeds the ratings for these robot controllers, so make sure to avoid stalling the motors). The TReX Jr dual motor controller makes it easy to turn this chassis into a platform that can be controlled by RC signals or serial commands, as shown in the video below:
|
|

Here is a simple C program for the Orangutan robot controllers that gets your RP5 chassis moving:
// Orangutan RP5 Demo Program
#include <avr/io.h> // provides ATmega-specific definitions/macros
#include <pololu/orangutan.h> // provides Pololu AVR library routines (LCD, motors, etc.)
int main()
{
clear(); // clear the LCD, set cursor to the start of the first LCD line
print("Tracked"); // print to the top line of the LCD
lcd_goto_xy(0, 1); // go to the start of the second LCD line
print("Chassis"); // print to the bottom line of the LCD
while (!button_is_pressed(ALL_BUTTONS)) {} // wait until a user button is pressed
delay_ms(500); // wait for 0.5 s
while (1) // loop forever
{
set_motors(255, 255);
delay_ms(5000);
set_motors(255, -255);
delay_ms(5000);
set_motors(-255, 255);
delay_ms(5000);
set_motors(-255, -255);
delay_ms(5000);
}
return 0;
}








